北京交通大学(BJTU)时间实验室团队(TLab)搭建GNSS系统时间(GNSST)和GNSS预测UTC(UTC(GNSS))实时监测系统,发布监测数据,并在导航领域顶刊《GPS Solutions》上发表了题为“Monitoring in real time—BDS system time and its broadcast UTC”的研究论文。论文链接:https://doi.org/10.1007/s10291-026-02050-8
致谢:本研究得到了烟台市重大科技创新工程项目(2024ZDCX002)、泰山产业领军人才(NO.tscx202408155)、国家自然科学基金(12473072)及国家铁路智能运输系统工程技术研究中心开放课题(2023YJ360)资助。
| 导语
北斗卫星导航系统(BDS)已完成全球组网,目前区域系统北斗二号(BDS-2)与全球系统北斗三号(BDS-3)共同提供定位、导航和授时(PNT)服务。两个系统的系统时间是否存在偏差、它们广播的协调世界时(UTC)是否一致、与其他GNSS系统时间的差异,以及这些偏差对多GNSS融合应用的影响,是值得关注的问题。团队系统性地分析了BDS-2与BDS-3系统时间及其广播UTC的性能差异,同时分析二者与GPS系统时间及其广播UTC的差异,为多GNSS互操作和高精度授时应用提供了参考。
| 研究亮点
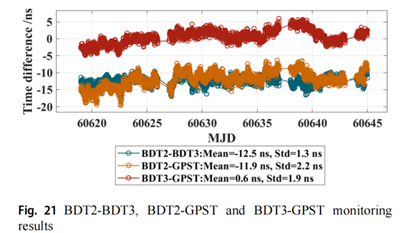
1、搭建实时监测系统并开展监测实验,实测得到BDT2与BDT3相差-12.5 ns,量化了BDS-2与BDS-3系统时间差异。
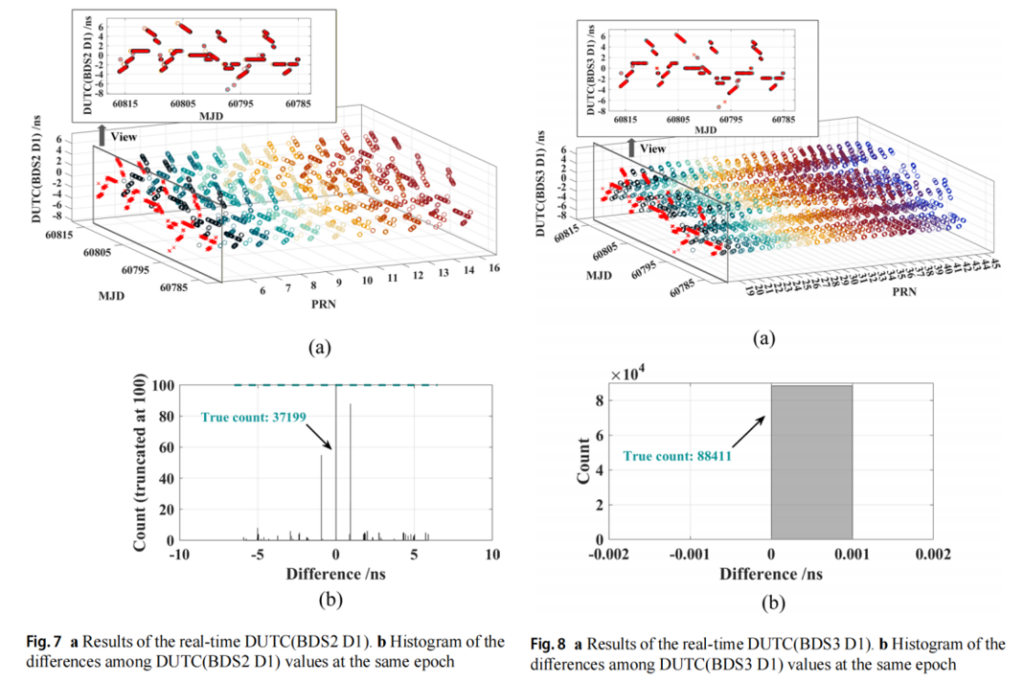
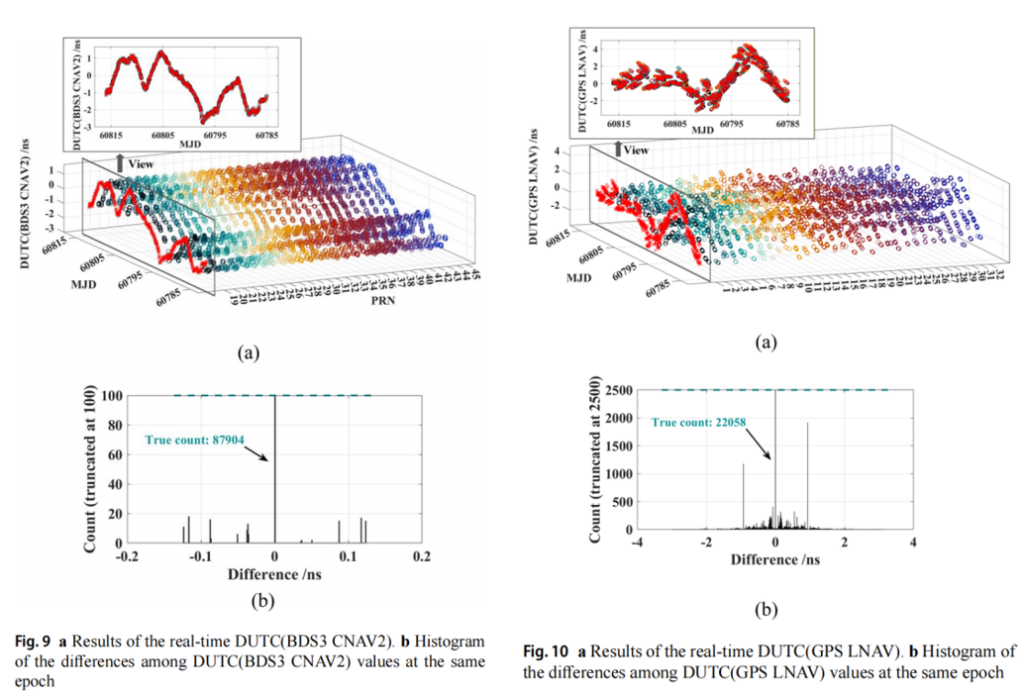
2、定义基于广播UTC参数集计算的GNSS系统时间(GNSST)与GNSS广播UTC(bUTCGNSS)的偏差为DUTC。同一观测历元,不同卫星、导航电文可能播发不同UTC参数集,造成DUTC分散,实验显示,不同UTC参数集计算的多个DUTC(BDS-3 D1)相等概率超过98%,DUTC(BDS-3 CNAV2)、DUTC(BDS-2 D1)亦然,但DUTC(BDS-2 D1)相等概率低于其他两者约1%,表明与通过BDS-2 D1电文获取UTC参数相比,使用BDS-3 D1和BDS-3 B-CNAV2电文中的UTC参数进行实时监测时,受DUTC分散影响较小。
3、提出的实时监测方法更新周期为16分钟,较BIPM Circular T 40天的周期显著提升时效性,同时监测不确定度水平与BIPM Circular T相当。
| 研究方法
团队在BJTU建立监测平台,平台依赖可精确溯源至UTC(NIM)的时标TS(BJTU)建立。平台连续接收北斗卫星信号,计算北斗系统时间与TS(BJTU)的差值;接收北斗卫星播发的UTC参数,计算北斗广播UTC与TS(BJTU)的偏差。
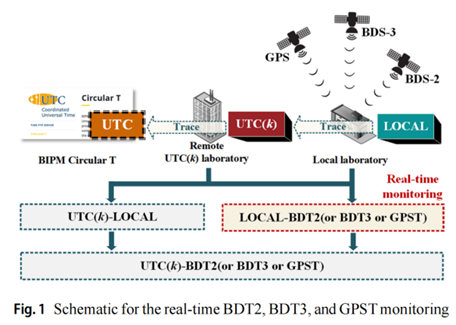
监测原理
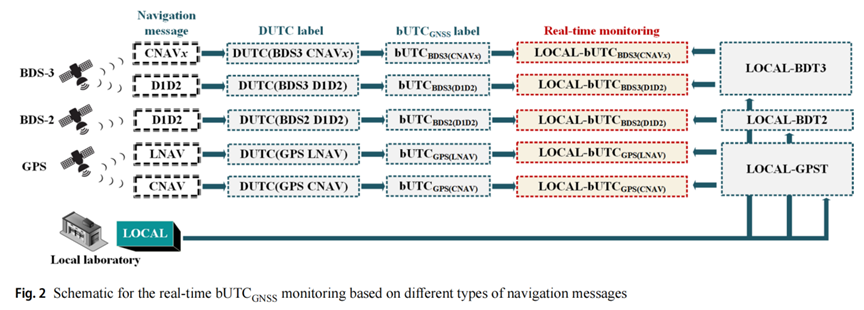
BDS2、BDS3、GPS各类型导航电文与DUTC对应关系
| 研究内容及结果分析
1、实时监测平台构建
GNSS时间传递接收机BJ01接入TS(BJTU),进行伪距和广播星历采集。
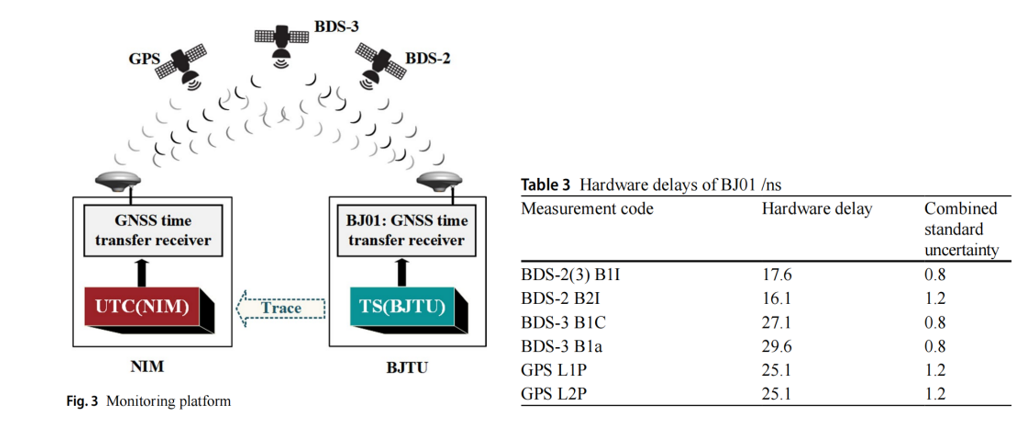
GNSS链路部署 | GNSS时间传递接收机BJ01各频点硬件延迟校准
2、DUTC分散性分析
每颗卫星各自播发UTC参数,而这些UTC参数可能不同,因此平台在某观测时刻,会计算出不同DUTC值,即DUTC存在分散性。基于接收的UTC参数,计算每颗卫星DUTC值。分析BDS-2 D1、BDS-3 D1、BDS B-CNAV2、GPS LNAV四种电文中,不同卫星播发UTC参数集不同导致的DUTC分散情况。
3、与BIPM Circular T比对验证
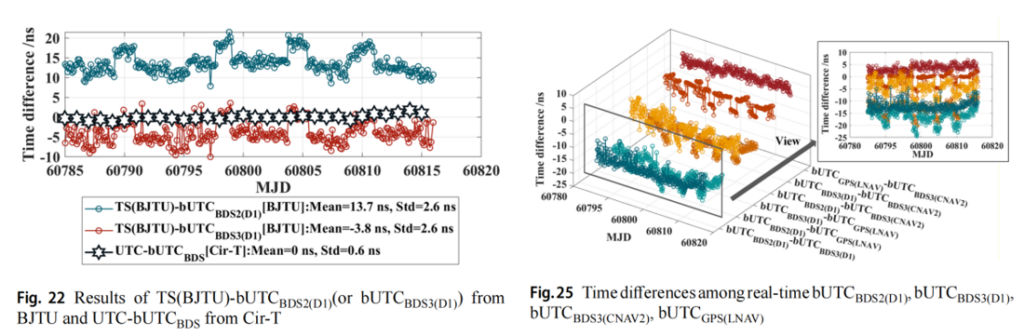
将平台实时监测结果TS(BJTU)-bUTCBDS3(CNAV2)、TS(BJTU)-bUTCGPS(LNAV)与BIPM Circular T同期数据UTC-bUTCBDS、UTC-bUTCGPS比对。
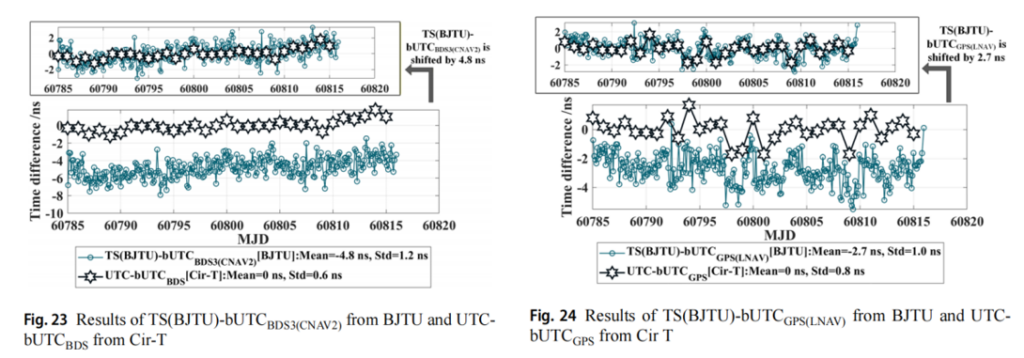
bUTCBDS:平台结果与Circular T差异在4.8 ns以内(吻合在BIPM Circular T给出的标准不确定度5 ns);
bUTCGPS:平台结果与Circular T差异在2.7 ns以内(吻合在BIPM Circular T给出的标准不确定度5 ns);
比对结果验证了实时监测平台的有效性。
4、实时监测不确定度评定
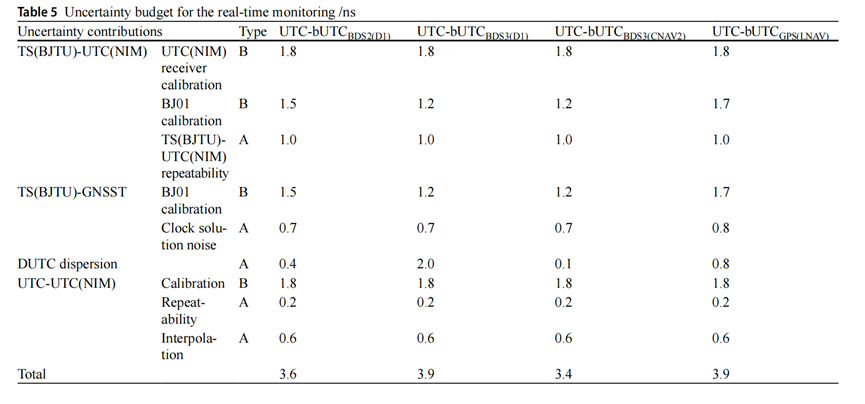
平台实时监测合成标准不确定度评定如下所示,其不确定度水平与BIPM Circular T相当(考虑存在用户希望实时监测结果可事后溯源至UTC,因此考虑了UTC-UTC(k))。
5、BDS-2、BDS-3系统时间与播发UTC差异监测
BDS-2系统时间与BDS-3系统时间存在12.5 ns差异。
bUTCGPS(LNAV)与bUTCBDS3(D1)相差4.4 ns,与bUTCBDS3(CNAV2)相差3.4 ns;bUTCBDS2(D1)与bUTCBDS3(D1)、bUTCDS3(CNAV2)、bUTCGPS(LNAV)的差异均超过12 ns。
| 文章结论
1、北斗系统时间存在差异:BDT2与BDT3相差-12.5 ns,虽满足北斗ICD的50 ns指标要求,但可能影响高精度用户。考虑到BDS-2不再拓展,建议用户优先使用BDS-3。
2、UTC参数一致性优异:不同UTC参数集计算的多个DUTC(BDS3 D1)相等概率超过98%,DUTC(BDS3 CNAV2)、DUTC(BDS2 D1)亦然,但DUTC(BDS2 D1)相等概率低于其他两者约1%,表明与通过BDS-2 D1电文获取UTC参数相比,使用BDS-3 D1和BDS3 B-CNAV2电文中的UTC参数进行实时监测时,受DUTC分散影响较小。
3、监测不确定度达国际水平:实时监测不确定度 UTC-bUTCBDS2(D1) 3.6 ns、UTC-bUTCBDS3(D1) 3.9 ns、UTC-bUTCBDS3(CNAV2) 3.4 ns、UTC-bUTCGPS(LNAV) 3.9 ns
4、RINEX v3用户需注意:无法区分UTC参数来源可能导致DUTC计算错误,建议升级至RINEX v4。
5、多GNSS融合应用建议:不同系统时间偏差可达10 ns级以上,覆盖范围较大的时间同步网络(如铁路时间同步网,覆盖全中国)需考虑并补偿这些偏差。
| 成果拓展
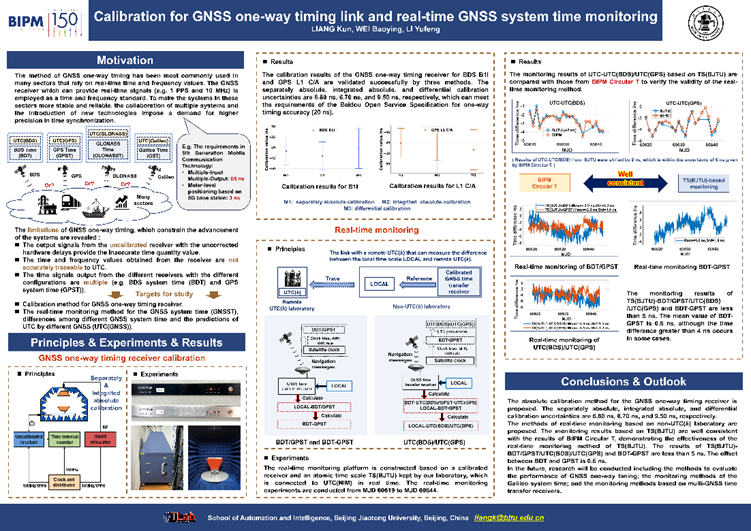
团队成果参加米制公约150周年活动并入选国际计量局网站展示,《Calibration for GNSS one-way timing link and real-time GNSS system time monitoring》
GNSST相关的实时监测结果已上线时间实验室网页,可供用户公开访问使用实时监测数据。页面采用Grafana可视化工具,选取合适面板类型,通过从数据库中获取数据,以将监测数据具体体现。从显示界面中可清晰、直观地观测数据,并能实现与数据库的数据同步更新,同时便于优化和配置。
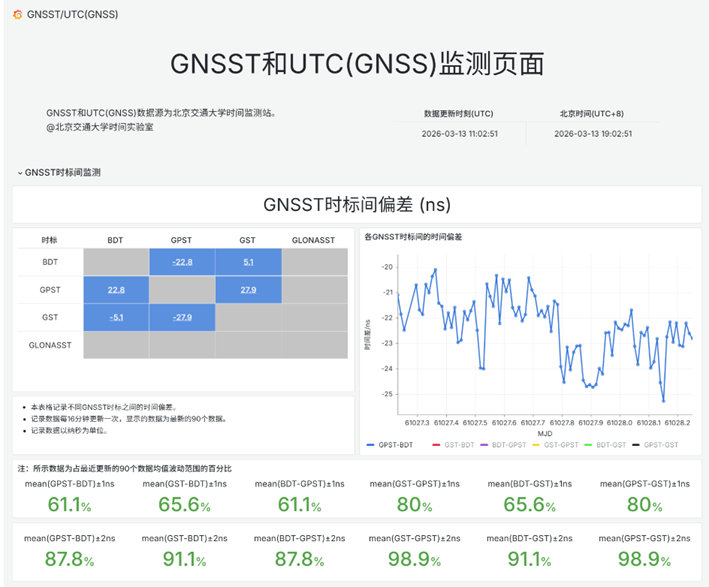
GNSST时标间偏差实时监测界面
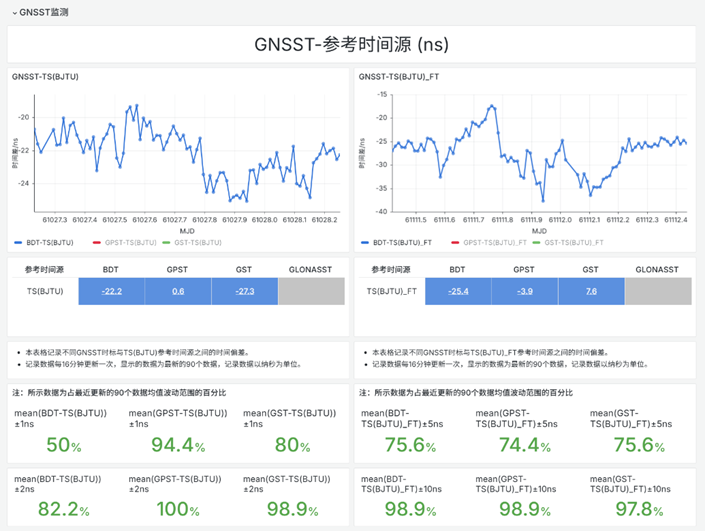
GNSST-TS(BJTU)实时监测界面
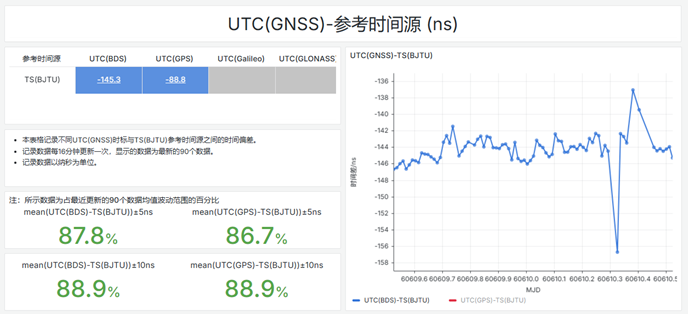
UTC(GNSS)-TS(BJTU)实时监测界面
每一项实时监测包括表格、折线图、时间差抖动占比统计三部分模块。表格中显示最新时刻更新的时间比对数据,折线图显示最近90个时间差数据,时间差抖动占比统计显示了对应折线图中时间差在其均值±5 ns和±10 ns内波动的数据所占比例。


