TLab-TFS-G1是一款小型化高性能时间频率同步标准单元,可接收GPS、GLONASS、北斗、Galileo多个系统的卫星信号,生成Rinex、CGGTTS等格式的数据,可采用“GNSS全/共视比对法”和载波相位法实现时间频率的精准远程比对。
TLab-TFS-G1可通过网页远程登录访问的服务器,界面友好、显示直观,方便用户远程控制、监测等,操作且易于控制和便携可移动,便于各种零现场原位测量;可生成多种格式的数据,实现时间频率的远程实时及事后的传递、比对和监测;可选装原子钟或高性能晶振,配置精准驯服控制系统,采用“GNSS共视法”,将本地时钟远程溯源至标注时间基准上,如:UTC(k),从而实现高精度时间频率信号产生。
也可根据用户需求,提供一些定制化的服务。
产品特点:
- 全系统GNSS卫星跟踪
- 高可靠性、高安全性的高精度授时
- 专业的精准时间传递与同步;
- 先进的干扰抑制功能
- 先进的人机接口架构,界面友好,访问便捷
形式:
- 1U标准机箱
- 定制模块
应用领域:
- 应用于高性能原子钟间及与标准原子时(如:UTC(k))的时间频率计量溯源、比对同步领域
- 应用于标准时间频率信号产生、测量及溯源传递
- 应用于构建多时钟站点的时间同步网络
- 应用于行业系统对标准时间频率溯源、比对、同步等功能的增加(模块形式)等
技术参数
GNSS信号接收特性:
跟踪系统:GPS,GLONASS,北斗,Galileo
跟踪通道:400个以上并行通道
测量数据:码和载波相位测量等
射频接口:TNC-F(可定制)
可输入参考频率信号特性:
输入信号:10 MHz,正弦波
输入阻抗:50欧
信号电平:1.2V-2.0V,Vpp
输入接口:BNC-F(可定制)
可输入参考1PPS信号特性:
输入信号:1PPS
输入阻抗:50欧
信号电平:5V TTL,上升沿有效
输入接口:BNC-F(可定制)
输出1PPS信号特性:
输出信号:1PPS,上升沿可同步于标准原子时
输出阻抗:50 欧
信号电平:5V TTL,脉冲宽度10 us,上升时间不超过10 ns
输出接口:BNC-F(可定制)
准确度:±10 ns(与远程时间频率参考对比,95%)
输出数据特性:
CGGTTS,V2E,含GPS、GLONASS、北斗和Galileo测量
Rinex,V3.04,含GPS、GLONASS、北斗和Galileo数据
GNSS原始测量数据
双站比对性能:
比对链路校准不确定度:可优于1.5 ns(根据第三方校准报告,或自校准报告)
比对链路引入不确定度:可优于2 ns
环境特性:
工作温度: 0℃-40℃
结构与尺寸:
标准19英寸上架机箱,1U高度;
控制显示软件:
配套显控软件,无论在局域网或Internet上,均可由用户通过浏览器实现远程控制和监测,用户可切换。
软件功能:
- 用户管理
由管理员和普通用户组成,管理员可进行任何操作,普通用户只能进行信息查看;
- 文件生成
可设置生成以下文件:
Rinex V3.04版本,含GPS、GLONASS、北斗和Galileo;
CGGTTS V2E版本,含GPS、GLONASS、北斗和Galileo。
- 数据发送
可设置FTP参数,完成周期或单次数据的上传;
- 测量参数
可设置CGGTTS、Rinex等测量参数;
- 远程控制及开关机
可实现远程对标准站的控制、初始化、重新启动及关机。
- 数据服务器
可远程从标准站下载各类测量数据。
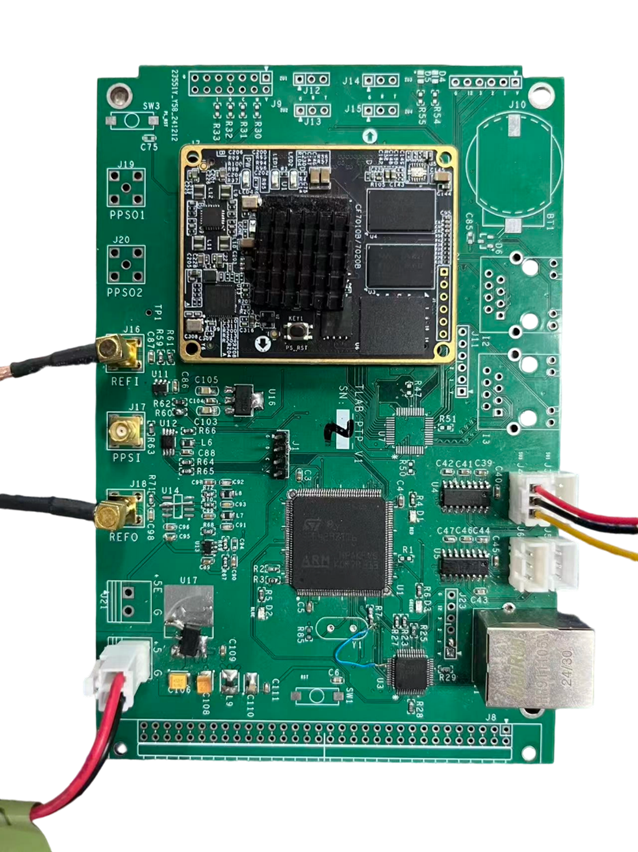
外观

正面

背面
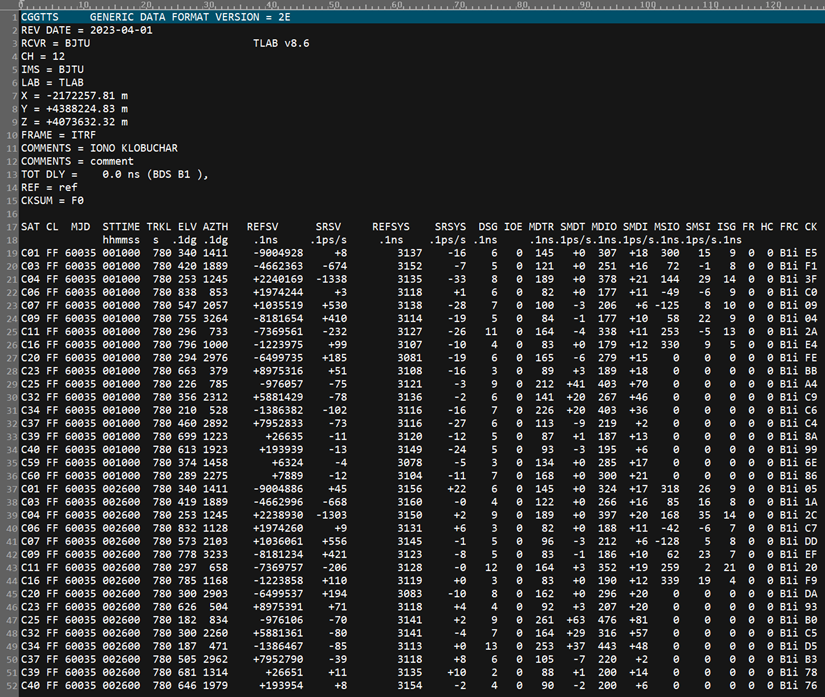
实际运行效果:
- 记录CGGTTS标准格式数据:
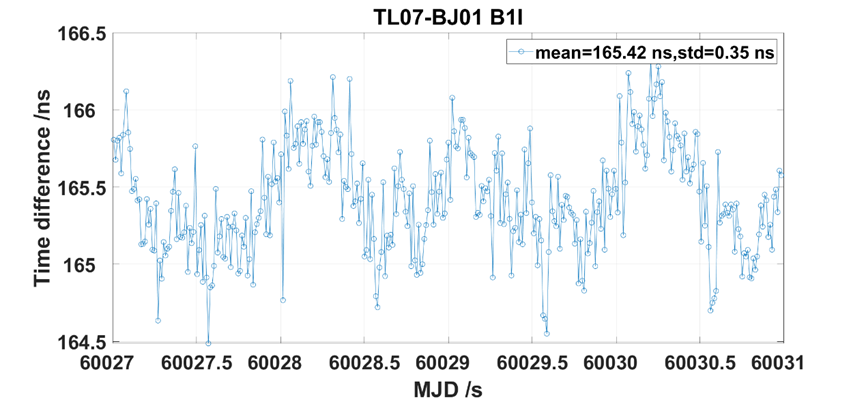
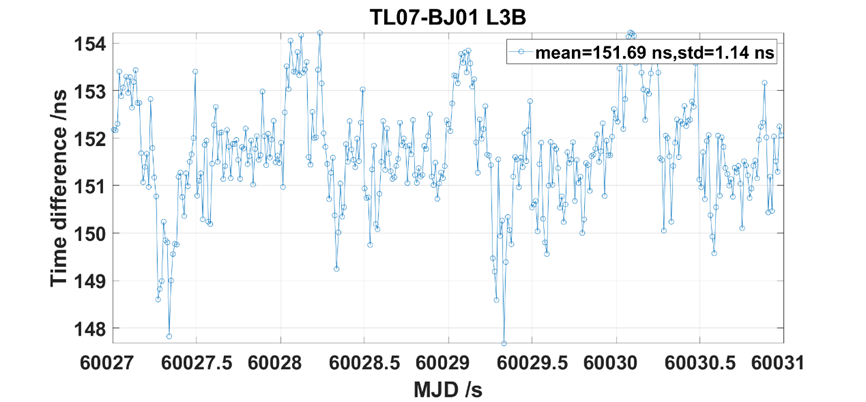
2.同型号接收机基于码的共钟差比对效果(BeiDou B1I/L3B与GPS L1C/L3P):
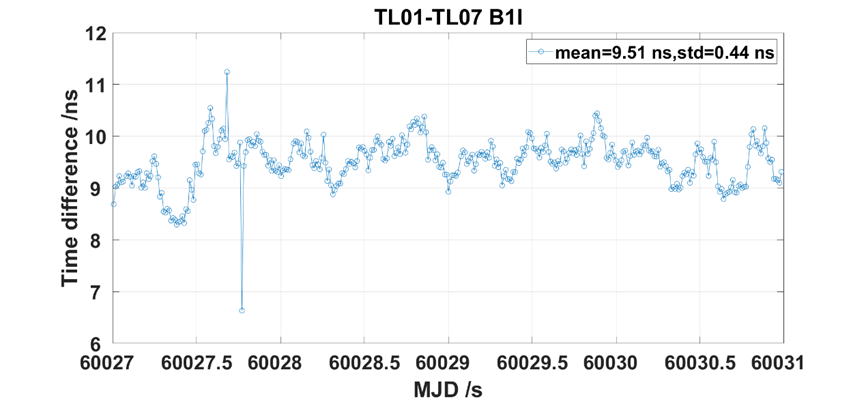
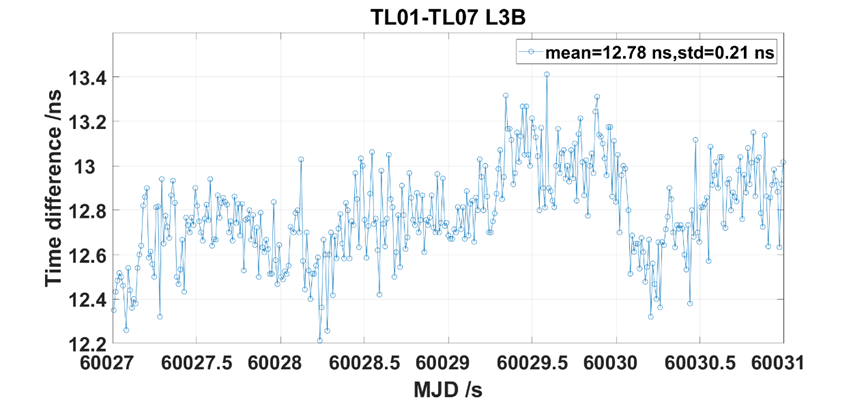
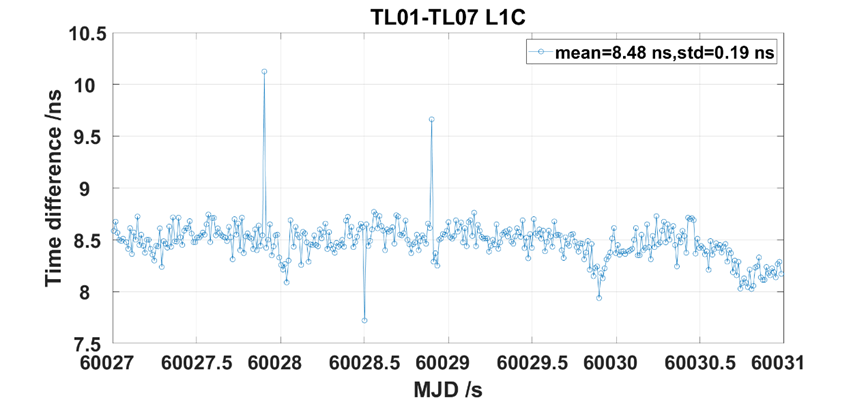
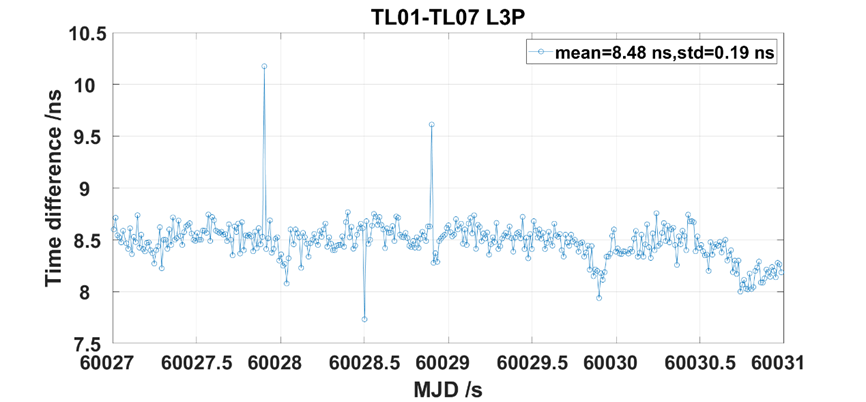
3. 同类型接收机共钟差比对效果(BeiDou B1I/L3B与GPS L1C/L3P):

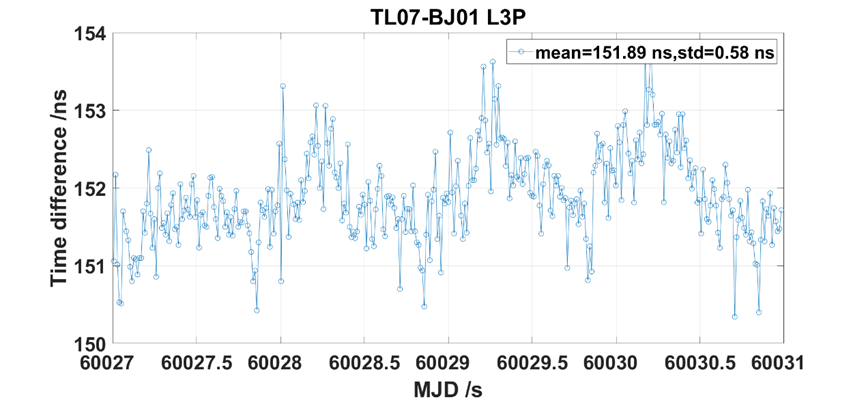
4. 同型号接收机基于载波相位的共钟差比对效果:

5. 同类型接收机基于载波相位的共钟差比对效果:
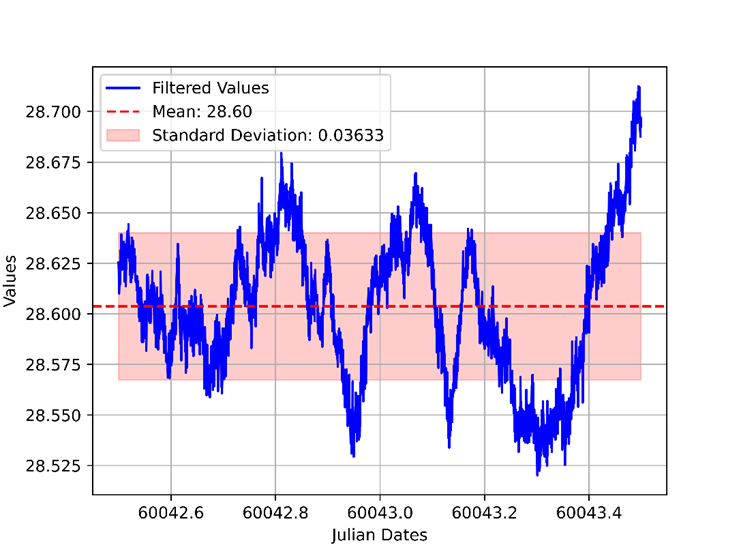
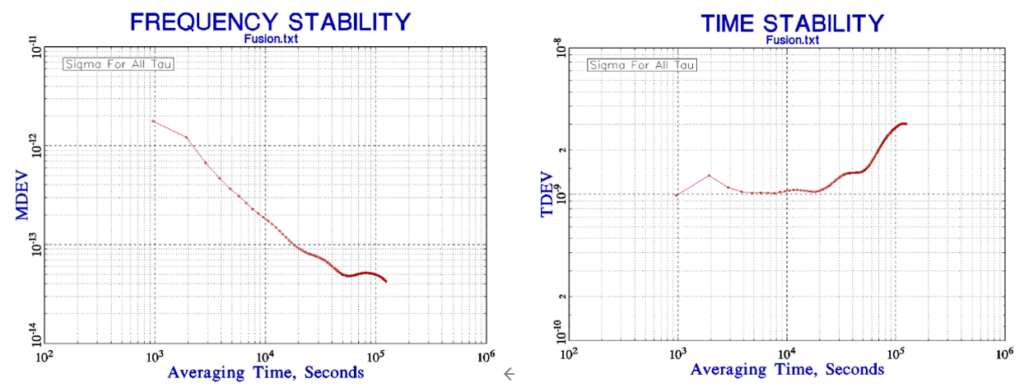
6. 驯服后与远程时间频率参考TS(BJTU)时差比对结果:

7.驯服后与远程时间频率参考TS(BJTU)频率稳定度和时间稳定度结果: